來源:e鍵打印
發布時間:2015-06-04 09:14:15
瀏覽次數:
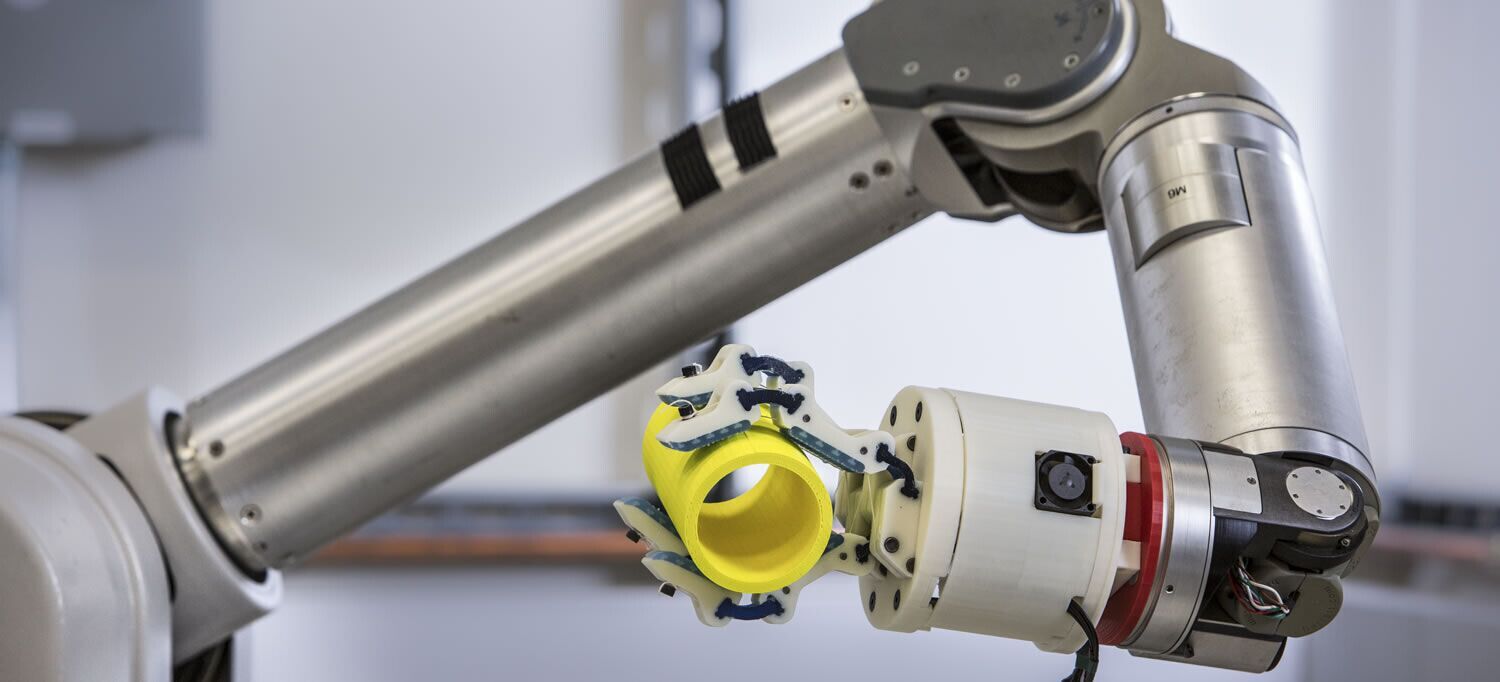
最近,耶魯大學的研究人員開發出一款3D打印的機器人末端執行器(機械手)。該執行器造價低廉、功能強大,并可大大提高機器人的“手”的靈活性。重要的是采用了開源設計,堪為個人愛好者的絕佳選擇。
使用3D打印機制作小型機器人已逐漸流行。但無論是個人愛好者還是商用機器人開發公司,如何讓機器人的“手”(末端執行器)像人手那樣活動都是個不小的難題。盡管研究人員想出了不少解決方案,但這些方案既昂貴又很難使用到其他裝置,且幾乎不可能被定制。
最近,為解決這一難題,耶魯大學機械工程教授Aaron Dollar領導的Openhand項目組提出了卓有成效的3D打印解決方案。該團隊開發的“手”成本低廉,且非常實用,能輕松撿起平躺在桌子上的硬幣。尤為關鍵的是,它是開源的。
研究人員希望有更多的人使用這種開源的機器人“手”,借此使機器人設計出現有機轉變,“這個項目打算打造一系列開源手的設計,并通過開源用戶群體的貢獻,產生大量有用的設計修改和變化提供給研究人員。因此,這個項目開發的手,設計必須簡約、堅固耐用,尤其要適合反復迭代和在非結構化環境中運行。”
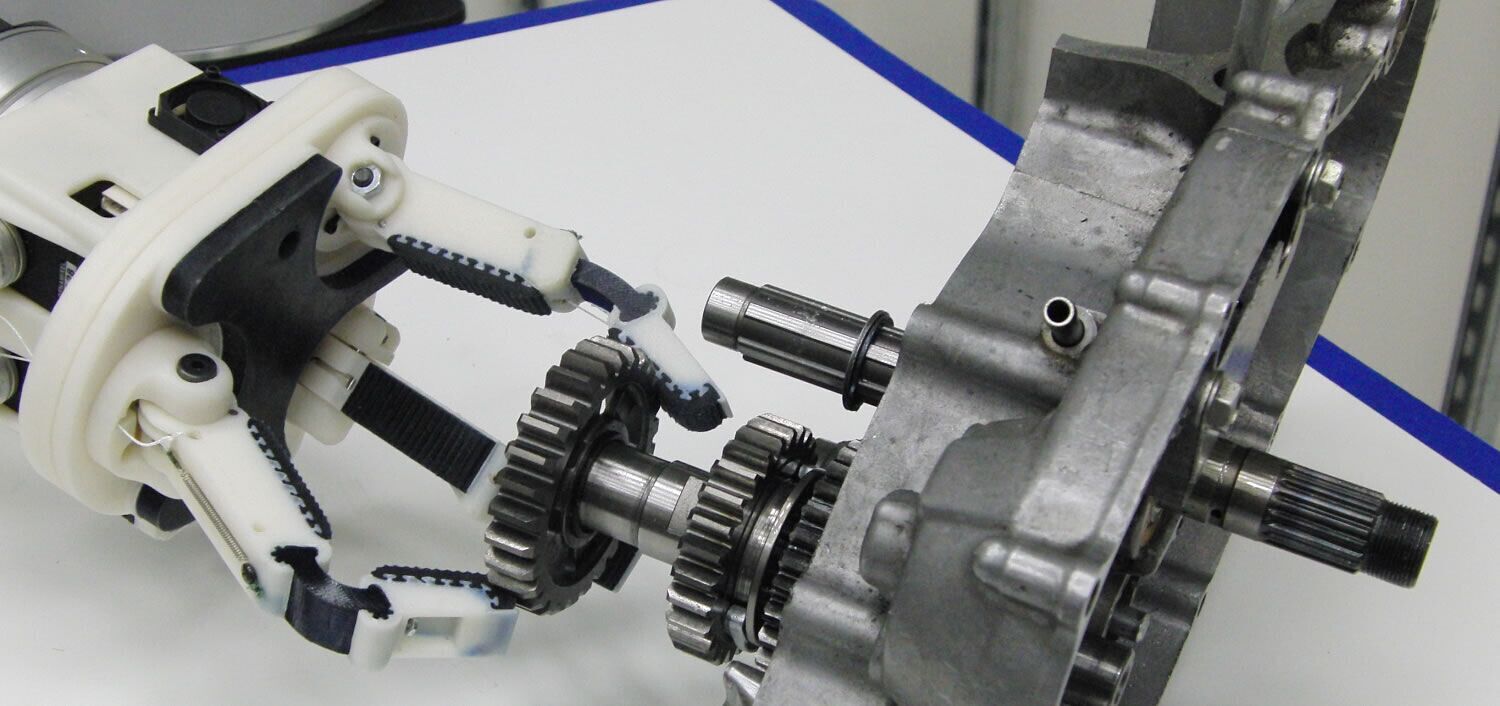
為真正做到如手使指,研究人員設計了一種轉盤式柔繩傳動(tendon-driven)的欠驅動手指。研究人員稱這種欠驅動(underactuated)手能夠根據接觸物體的表面進行自適應調整,實現簡單的抓握,而無需傳感器或復雜的反饋系統。“這個設計范例將致動和手指元素分離開來,從而能夠實現更大程度的定制。”
創客聯盟了解到,Aaron Dollar的團隊僅僅使用3D打印、樹脂澆鑄以及一些手工制作就完成了這一項目。他們使用3D打印機制造樹脂模具和塑料手指,前者使用樹脂澆鑄成型,再進行固化和切割,這樣就做出了機械手的“肌腱”和指墊。
最終成型的手指強大且靈活,只需要極少的緊固件和其他功能部件。這些柔繩驅動的手指可以沿著物體的周圍自然地蜷縮,并像真人的手那樣均勻地分配力量。使用手上的指墊還可輕松拿起扁平的小物件,比如硬幣。
項目組把這些柔繩驅動手指的開源軟件和CAD文件設計為允許進行變量修改設置,創客們將可根據自己的需要調整這個機器人手設計,打印出不同參數的相關部件。
目前,該項目團隊已經把相關文件上傳至網上,有興趣的創客們可去耶魯大學官網下載相關文件。當然,創客聯盟的小編也為大家備好了梯子:http://www.eng.yale.edu/grablab/openhand/index.html#about
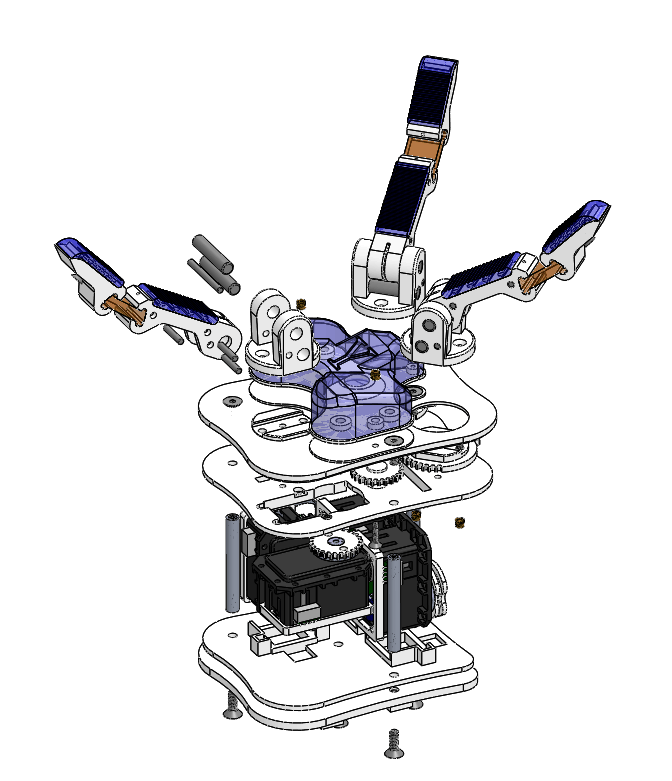
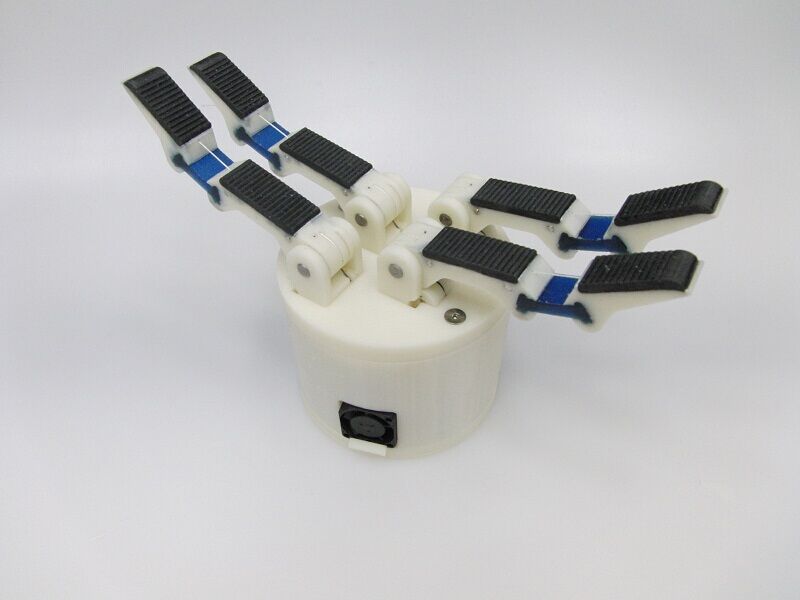
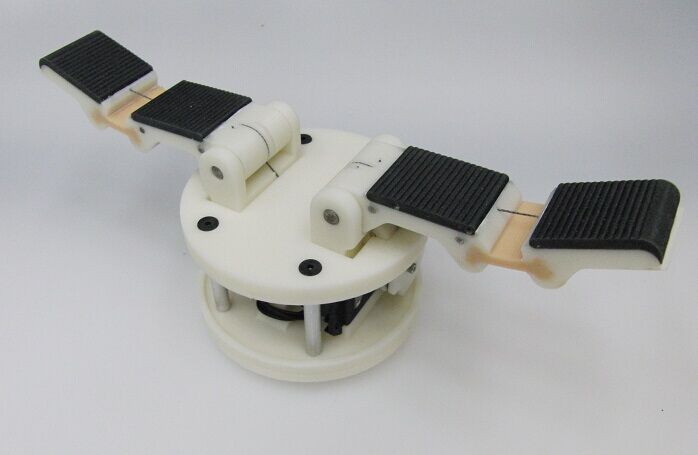
圖為研究人員開發的基于同一機械原理的四種不同的端部執行器: